RDI ADCP Time Series
Data files for Teledyne RDI ADCPs are described here. Ancillary data (e.g., temperature, pitch, roll) are also available independently, through scalar data products, see time series scalar data and time series scalar plots.
Oceans 2.0 API filter: dataProductCode=RADCPTS
Revision History
- 2020304: netCDF format update: added ancillary data (e.g. Beam Velocity, Correlations, Intensity), apply compression, and change format to netcdf4 classic.
- 20180501: New options added for three-beam solutions, screening and fish detection.
- 20150903: RDI files now use corrected heading/pitch/roll as specified by site and sitedevice meta data. RDI files with Earth co-ord data are rotated to the corrected heading or apply magnetic declination. These changes do not change the MAT/PNG/NC/PDF data products produced from RDI files other than the compassHeading/pitch/roll values within the MAT/NC files. These changes will allow RDI files to be made available.
- 20150601: Added bin-mapping options (None, nearest vertical, linear).
- 20150228: Depth cell / bin mapping added to correct range and velocity for tilt.
- 20141222: Heading correction rework (affecting ENU / uvw velocities): handle sites with null positions, mobile sensors, autonomous deployments, and better documentation of processing was done to the data.
- 20130317: Bug fixes, including making the number of dimensions of data structures fixed (trailing singleton dimensions are always dropped in MATLAB however).
- 20110328: NetCDF, CF1.5 compliant product released.
- 20110202: Correction for determination of ENU (with respect to true North) velocities. Prior code assumed ADCP was downward-facing. Updated code uses orientation or instrument to convert to ENU coordinates.
- 20100521: Derived backscatter added to MAT contents.
- 20100513: Initial NetCDF product released for RDI ADCPs, available in CF-1.4 compliant format.
- 20100218: MAT contents made more complete and descriptive
- 20091208: Initial RDI and MAT products released
Formats
This data is available as raw data in RDI files, or as processed data in MAT and NETCDF formats. Content descriptions and example files are provided below.
Manufacturer's Raw Binary Format: .RDI Files
This binary format is specific to the manufacturer. When using Teledyne-RDI data acquisition software, data is normally stored in this way. Although we use custom-built drivers to communicate with our instruments, we can use the raw data in the log file to produce the RDI file which can be interpreted by Teledyne-RDI post-processing software.
To produce the file, the following requirements apply:
- A new RDI file is started at the beginning of each day, when the maximum records per file is exceeded, or when the driver is restarted (this should account for configuration changes, site changes, etc).
- Only records with valid checksums are included.
- The instrument date/time field is replaced using the NEPTUNE timestamp at the beginning of the log file (since this timestamp is more accurate than the instrument clock), and the checksum is recalculated.
- For Beam or Instrument co-ordinate data, heading/pitch/roll (EH/EP/ER) data in the variable length data header are replaced as specified by site and sitedevice metadata (replacing the often unreliable onboard compass) (the EZ sensor source value is changed to manual for each). For Earth co-ordinate data, only the heading is updated with the value from the site and sitedevice metadata, if the internal compass sensor is used, it is corrected for magnetic declination, else if the internal heading value is set manually, it is left alone. Also for Earth data, because the heading has changed, the North/South current velocities are rotated to the new heading. These changes do not change the velocities in the MAT/PNG/NC/PDF data products produced from RDI files, other than the compassHeading/pitch/roll values within the MAT/NC files. The original magnetic compass, pitch and roll maybe replaced by these fixed or external sensor values, however, users can access the original sensor data via scalar data products and services.
For users' information and interest, the site and sitedevice information is available through the device details pages, for example: http://dmas.uvic.ca/DeviceListing?DeviceId=20003. This information is also included in the metadata report that accompanies most data products.
This format is further described in the manufacturer's documentation.
Example: RDIADCP75WH17432_20131113T000000.000Z.rdi
Oceans 2.0 API filter: extension=rdi
Processed Data
Ensemble Period (ping averaging)
For RDI ADCP data file products (MAT and netCDF formats)
![]()
Ensemble Period:
Data not altered (none)
Oceans 3.0 API filter:dpo_ensemblePeriod=0
1 Minute
Oceans 3.0 API filter:dpo_ensemblePeriod=6010 Minute
Oceans 3.0 API filter:dpo_ensemblePeriod=60015 Minute
Oceans 3.0 API filter:dpo_ensemblePeriod=9001 Hour
Oceans 3.0 API filter:dpo_ensemblePeriod=3600
When selecting any of the ensemble periods, this option will cause the search to perform the standard box-car average resampling on the data. 'Boxes' of time are defined based on the ensemble period, e.g. starting every 15 minutes on the 15s, with the time stamp given as the center of the 'box'. Acoustic pings that occur within that box are averaged and the summary statistics are updated. This process is often called 'ping averaging'. The process uses log scale averaging on the intensity data, which involves backing out the logarithmic scale, compute the weighted average, and then compute the logarithmic scale again. Weighted averages are used when raw files bridge an ensemble period and when the data is already an ensemble or ping average.
New files are started when the maximum records per file is exceeded (usually set to make files that will use less than 1 GB of memory when loaded), or when there is a configuration, device or site changes. In the case where there is data from either side of a configuration change within the one ensemble period, two files will be produced with the same ensemble period, with the same time stamps, but different data. Users may use the ensemble statistics on the number of pings or samples per ensemble to filter out ensembles that do not have enough data. (As an aside, we do this by default with clean averaged scalar data - each ensemble period needs to have at least 70% of it's expected data to be reported as good.)
The default value is no averaging, meaning the data is not altered. This option is only available for MAT and NETCDF files.
File-name mode field
Selecting an ensemble period will add 'Ensemble' followed by the ensemble period. For example '-Ensemble600s'.
Velocity Bin-mapping (tilt compensation EX)
For all RDI ADCP data products (PNG/PNG and MAT and netCDF formats)
![]()
This option specifies the bin-mapping processing method to be applied. Bin-mapping is also known as 'depth cell mapping' or 'tilt compensation' or even 'map to vertical'. There are two methods, both correct for tilt effects on ADCP velocity data, while the none option leaves the velocity data as is. For details on the two methods, see the section on correction and rotation of velocities (included below). The 'None' option is the default for Nortek ADCPs since the free version of the manufacturer's software does not apply bin-mapping (a core goal of our data products is to replicate the functionality offered by the manufacturer's software). The 'Nearest vertical bin' is the default for RDI ADCPs as winADCP applies this method for Instrument or Beam co-ordinate data. The 'As configured on the device' option uses the configuration onboard to determine whether to apply bin-mapping, this matches processing on-board the device (for Earth-co-ordinate data, while for Instrument or Beam co-ordinate data winADCP ignores the device configuration and always uses 'Nearest vertical bin'). The best method has been shown to be the linear interpolation method (Ott, 1992).
Nearest vertical bin
Oceans 3.0 API filter:dpo_velocityBinmapping=1- As configured on the device (matches processing on device)
Oceans 3.0 API filter:dpo_velocityBinmapping=-1 None
Oceans 3.0 API filter:dpo_velocityBinmapping=0Linear interpolation (Ott method)
Oceans 3.0 API filter:dpo_velocityBinmapping=2
File-name mode field
The velocity bin-mapping option will be appended to the filename. For example: '-binMapNone', 'binMapLinearInterp', 'binMapNearest'.
Three-beam Solutions (EX)
For all RDI ADCP data products (PNG/PNG and MAT and netCDF formats)
![]()
Three-beam solutions allow computation of velocity from three beams when the fourth beam has been masked or screened to NaN, as described in ADCP Velocity Computation: Correction and Rotation to East-North-Up Co-ordinate System, Three-beam Solutions and Screening (included below). This option allows the user to use the on-device configured value or override it and select whether or not to use three-beam solutions. The default value retains the previous behaviour of ONC data products: off. Only available on Instrument or Beam co-ordinate data.
Off
Oceans 3.0 API filter: dpo_3beam=OffAs configured on the device (matches winADCP)
Oceans 3.0 API filter: dpo_3beam=configOn
Oceans 3.0 API filter: dpo_3beam=On
File-name mode field
If a value other than the default is used, a '-3beam'<value> will be appended to the file-name, where <value> is the value of the option matching the API filter.
Low Correlation Screen Threshold (WC)
For all RDI ADCP data products (PNG/PNG and MAT and netCDF formats)

This option allows the user to control the RDI correlation screening step. The default value retains the previous behaviour of ONC data products: a threshold of 64 counts. Beam-velocities that have associated correlation values lower than this threshold are are masked / screened to NaN values. Only available on Instrument or Beam co-ordinate data. The WC command configures this value on-board the device which is then used for on-board processing (Earth co-ordinate data only). ONC data products can use the WC set value to match winADCP output or the user can override it.
64 counts (RDI default)
Oceans 3.0 API filter: dpo_corScreen=64As configured on the device (matches winADCP)
Oceans 3.0 API filter: dpo_corScreen=-1Off (0 counts)
Oceans 3.0 API filter: dpo_corScreen=0Any value between 1 and 255
Oceans 3.0 API filter:dpo_corScreen=<1:255>
File-name mode field
If a value other than the default is used, a '-corr'<value> will be appended to the file-name, where <value> is the value of the option matching the API filter.
Error Velocity Screen Threshold (WE)
For all RDI ADCP data products (PNG/PNG and MAT and netCDF formats)
![]()
This option allows the user to control the RDI error veloctiy screening step. The default value retains the previous behaviour of ONC data products: a threshold of 2 m/s. Final East-North-Up co-ordinate velocities that have associated error velocity values higher than this threshold are masked / screened to NaN values (lower values are more stringent). Available on all data, except for velocities are the result of a three-beam solution, see ADCP Velocity Computation: Correction and Rotation to East-North-Up Co-ordinate System, Three-beam Solutions and Screening (included below) for more information on how three-beam solutions and the error velocites are related. The WE command configures this value on-board the device which is then used for on-board processing (Earth co-ordinate data only). ONC data products can use the WE set value to match winADCP output or the user can override it.
2 m/s
Oceans 3.0 API filter:dpo_errVelScreen=2As configured on the device (matches winADCP)
Oceans 3.0 API filter:dpo_errVelScreen=-10 m/s ( off )
Oceans 3.0 API filter:dpo_errVelScreen=05 m/s
Oceans 3.0 API filter:dpo_errVelScreen=51 m/s
Oceans 3.0 API filter:dpo_errVelScreen=10.5 m/s
Oceans 3.0 API filter:dpo_errVelScreen=0.50.25 m/s
Oceans 3.0 API filter:dpo_errVelScreen=0.250.1 m/s
Oceans 3.0 API filter:dpo_errVelScreen=0.1
File-name mode field
If a value other than the default is used, a '-errVal'<value> will be appended to the file-name, where <value> is the value of the option matching the API filter.
False Target Threshold Maximum (WA)
For all RDI ADCP data products (PNG/PNG and MAT and netCDF formats)

This option controls the False Target Detection algorithm, which is also known as the Fish Rejection algorithm. See chapter 7 in the adcp coordinate transformation_Jan10.pdf documentation from RDI. Essentially, the algorithm looks at the echo levels from bins at the same depth/range and if there is a large difference in their levels, it rejects them in two steps: reject one bin (then the 3-beam solution may apply, so it is suggested to use Fish Rejection and Three-beam solutions together), and if that does not resolve the difference, reject all bins at that depth/range. Lower values of the threshold are more stringent. Available on Beam and Instrument co-ordinate data only, Earth co-ordinate data may have had this algorithm to it onboard the device, see the WA command and configuration value. ONC data products can use the WA configuration value to match winADCP output or the user can override it.
255 counts
Oceans 3.0 API filter:dpo_falseTarScreen=255As configured on the device (matches winADCP)
Oceans 3.0 API filter:dpo_falseTarScreen=-1192 counts
Oceans 3.0 API filter:dpo_falseTarScreen=192128 counts
Oceans 3.0 API filter:dpo_falseTarScreen=12864 counts
Oceans 3.0 API filter:dpo_falseTarScreen=6450 counts (RDI default)
Oceans 3.0 API filter:dpo_falseTarScreen=5032 counts
Oceans 3.0 API filter:dpo_falseTarScreen=3216 counts
Oceans 3.0 API filter:dpo_falseTarScreen=16
File-name mode field
If a value other than the default is used, a '-falseTar'<value> will be appended to the file-name, where <value> is the value of the option matching the API filter.
ADCP Velocity Computation: Correction and Rotation to East-North-Up Co-ordinate System, Three-beam Solutions and Screening
MAT Files
MAT files (v7) can be opened using MathWorks MATLAB 7.0 or later. The file contains four structures: meta, adcp, config, and units.

- deviceID: A unique identifier to represent the instrument within the Ocean Networks Canada data management and archiving system.
- creationDate:Date and time (using ISO8601 format) that the data product was produced. This is a valuable indicator for comparing to other revisions of the same data product.
- deviceName: A name given to the instrument.
- deviceCode: A unique string for the instrument which is used to generate data product filenames.
- deviceCategory: Device category to list under data search ('Echosounder').
- deviceCategoryCode: Code representing the device category. Used for accessing webservices, as described here: API / webservice documentation (log in to see this link).
- lat: Fixed value obtained at time of deployment. Will be NaN if mobile or if both site latitude and device offset are null. If mobile, sensor information will be available in mobilePositionSensor structure..
- lon: Fixed value obtained at time of deployment. Will be NaN if mobile or if both site longitude and device offset are null. If mobile, sensor information will be available in mobilePositionSensor structure.
- depth: Fixed value obtained at time of deployment. Will be NaN if mobile or if both site depth and device offset are null. If mobile, sensor information will be available in mobilePositionSensor structure.
- deviceHeading: Fixed value obtained at time of deployment. Will be NaN if mobile or if both site heading and device offset are null. If mobile, sensor information will be available in mobilePositionSensor structure.
- devicePitch: Fixed value obtained at time of deployment. Will be NaN if mobile or if both site pitch and device offset are null. If mobile, sensor information will be available in mobilePositionSensor structure.
- deviceRoll: Fixed value obtained at time of deployment. Will be NaN if mobile or if both site roll and device offset are null. If mobile, sensor information will be available in mobilePositionSensor structure.
- siteName: Name corresponding to its latitude, longitude, depth position.
- locationName: The node of the Ocean Networks Canada observatory. Each location contains many sites.
- stationCode: Code representing the station or site. Used for accessing webservices, as described here: API / webservice documentation (log in to see this link).
- dataQualityComments: In some cases, there are particular quality-related issues that are mentioned here.
- MobilePositionSensor: A structure with information about sensors that provide additional scalar data on positioning and attitude (latitude, longitidue, depth below sea surface, heading, pitch, yaw, etc).
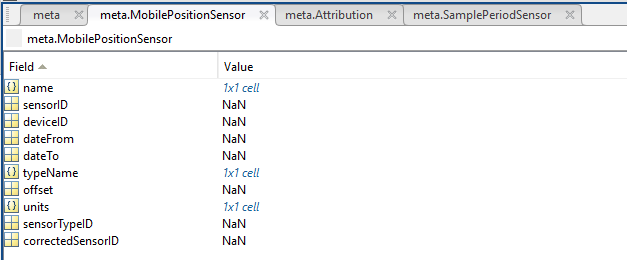
- name: A cell array of sensor names for mobile position sensors. If not a mobile device, this will be an empty cell string.
- sensorID: An array of unique identifiers of sensors that provide position data for mobile devices - this data may be used in this data product.
- deviceID: An array of unique identifiers of devices that provide position data for mobile devices - this data may be used in this data product.
- dateFrom: An array of datenums denoting the range of applicability of each mobile position sensor - this data may be used in this data product.
- dateTo: An array of datenums denoting the range of applicability of each mobile position sensor - this data may be used in this data product.
- typeName: A cell array of sensor names for mobile position sensors. If not a mobile device, this will be an empty cell string. One of: Latitude, Longitude, Depth, COMPASS_SENSOR, Pitch, Roll.
- offset: An array of offsets between the mobile position sensors' values and the position of the device (for instance, if cabled profiler has a depth sensor that is 1.2 m above the device, the offset will be -1.2m).
- sensorTypeID: An array of unique identifiers for the sensor type.
- correctedSensorID: An array of unique identifiers of sensors that provide corrected mobile positioning data. This is generally used for profiling deployments where the latency is corrected for: CTD casts primarily.
- deploymentDateFrom: The date of the deployment on which the data was acquired.
- deploymentDateTo: The date of the end of the deployment on which the data was acquired (will be NaN if still deployed).
- samplingPeriod: Sample period / data rating of the device in seconds, this is the sample period that controls the polling or reporting rate of the device (some parsed scalar sensors may report faster, some devices report in bursts) (may be omitted for some data products).
- samplingPeriodDateFrom: matlab datenum of the start of the corresponding sample period (may be omitted for some data products).
- samplingPeriodDateTo: matlab datenum of the end of the corresponding sample period (may be omitted for some data products).
- sampleSize: the number of readings per sample period, normally 1, except for instruments that report in bursts. Will be zero for intermittent devices (may be omitted for some data products).
- SamplePeriodSensor: A structure array with an entry for each scalar sensor on the device (even though this metadata is for complex data products that don't use scalar sensors).
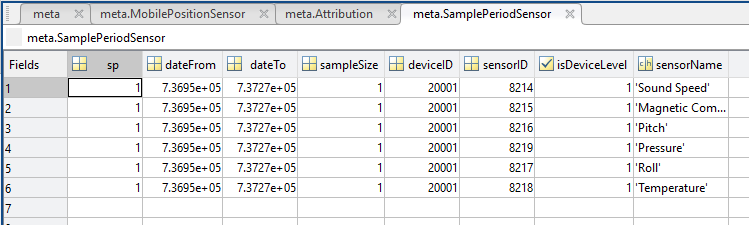
- sp: sample period in seconds (array), unless sensorid is NaN then this is the device sample period
- dateFrom: array of date from / start date (inclusive) for each sample period in MATLAB datenum format.
- dateTo: array of date to / end date (exclusive) for each sample period in MATLAB datenum format.
- sampleSize: the number of readings per sample period (array). Normally 1, except for instruments that report in bursts. Will be zero for intermittent devices.
- deviceID: array of unique identifiers of devices (should all be the same).
- sensorID: array of unique identifiers of sensors on this device.
- isDeviceLevel: flag (logical) that indicates, when true or 1, if the corresponding sample period/size is from the device-level information (i.e. applies to all sensors and the device driver's poll rate).
- sensorName: the name of the sensor for which the sample period/size applies (much more user friendly than a sensorID).
- citation: a char array containing the DOI citation text as it appears on the Dataset Landing Page. The citation text is formatted as follows: <Author(s) in alphabetical order>. <Publication Year>. <Title, consisting of Location Name (from searchTreeNodeName or siteName in ONC database) Deployed <Deployment Date (sitedevicedatefrom in ONC database)>. <Repository>. <Persistent Identifier, which is either a DOI URL or the queryPID (search_dtlid in ONC database)>. Accessed Date <query creation date (search.datecreated in ONC database)>
- Attribution: A structure array with information on any contributors, ordered by importance and date. If an organization has more than one role it will be collated. If there are gaps in the date ranges, they are filled in with the default Ocean Networks Canada citation. If the "Attribution Required?" field is set to "No" on the Network Console then the citation will not appear. Here are the fields:

- acknowledgement: the acknowledgement text, usually formatted as "<organizationName> (<organizationRole>)", except for when there are no attributions and the default is used (as shown above).
- startDate: datenum format
- endDate: datenum format
- organizationName
- organizationRole: comma separated list of roles
- roleComment: primarily for internal use, usually used to reference relevant parts of the data agreement (may not appear)
adcp: structure containing the ADCP data, having the following fields.
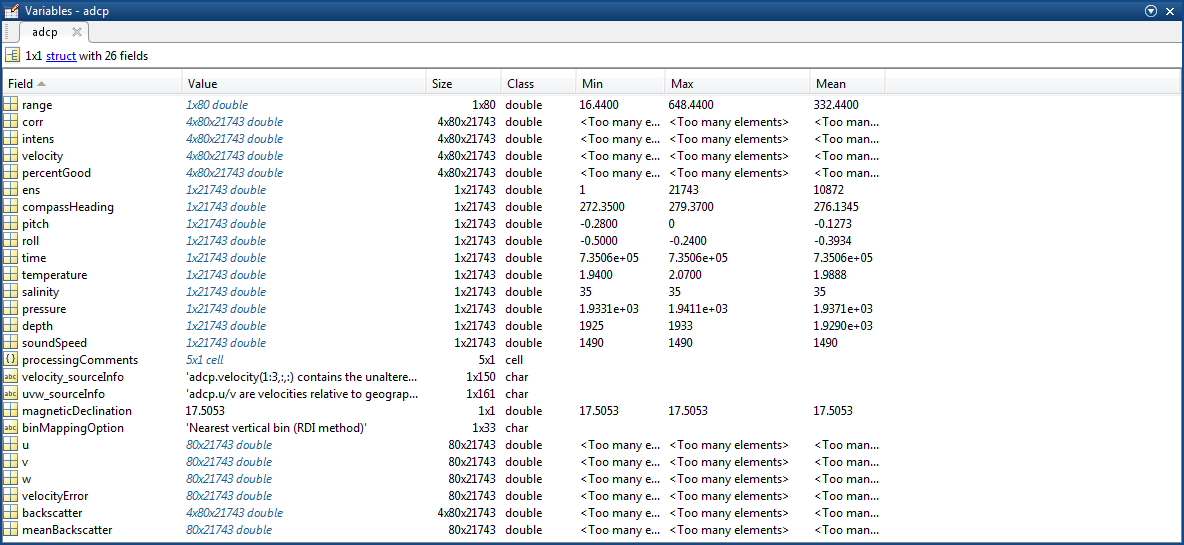
range: vector of distance to each bin centre. If bin mapping compensation for tilt is active, then the bins are moved so that ADCP.range is now the vertical range to the corrected bin centres (ADCP.range values are not changed by bin-mapping). See adcp.processingComments to see if bin mapping was applied. To calculate the depth of each velocity bin, use the following:
if strcmp(Config.orient, 'Up')binDepth = Meta.depth - ADCP.range;elsebinDepth = Meta.depth + ADCP.range;end- corr: 3D matrix, correlation time-series for each bin
- intens: 3D matrix, intensity time-series for each bin (also known as received signal strength intensity or RSSI, multiply by 0.45 dB/count to convert to a relative dB scale)
- velocity: 3D matrix, corresponds directly to output of instrument and so depends on configuration coordinate system
- percentGood: 3D matrix, percent good time-series for each bin
- ens: vector, ensemble number (replaced ensFirst for averaged products)
- ensFirst: vector of the first ensemble number in an ensemble average (averaged products only, replaces ens).
- compassHeading: vector, containing the EH values from the RDI files. This is either the fixed value from site and sitedevice headings (if not null), or values from an assigned true heading mobile position sensor. If neither, then it defaults to the magnetic compass heading data.
- pitch: vector, containing the EP values from the RDI files. This is either the fixed value from site and sitedevice headings (if not null), or values from an assigned true heading mobile position sensor. If neither, then it defaults to the onboard pitch sensor data.
- roll: vector, containing the ER values from the RDI files. This is either the fixed value from site and sitedevice headings (if not null), or values from an assigned true heading mobile position sensor. If neither, then it defaults to the onboard roll sensor data.
- time: vector, timestamp in datenum format (obtained from time the reading reached the shore station)
- temperature: vector, temperature time-series
- salinity: vector salinity time-series, (may contain constant values depending on device configuration)
- pressure: vector, pressure time-series. From RDI manual: "Contains the pressure of the water at the transducer head relative to one atmosphere (sea level). Output is in
decapascals". Converted to decibar. - depth: vector, depth of the device below the water surface as measured by the device for each ping. Can be set to a fixed value by the ED command / device attribute. For fixed deployments, this value is replaced in the RDI file by our code with the site depth plus offset, which is also reported as meta.depth. If not a fixed location deployment where the device is autonomous or mobile, this value is unaltered. It will vary with the tide and movement.
- soundSpeed: vector speed of sound time-series, (may contain constant values depending on device configuration)
- uMagnetic (optional): 2D matrix, East velocity relative to magnetic North
- vMagnetic (optional): 2D matrix, North velocity relative to magnetic North
- processingCommments: a string documenting all of the processing steps done to produce adcp.u/v/w. Use
char(adcp.processingComments)to print out the text. - processingOptions: a structure with the data product option set that was requested and what was actually done (not all options are available and maybe overriden at run time, this will be explained in the processingComments).
- velocity_sourceInfo: a string describing the source of data in adcp.velocity
- uvw_sourceInfo: a string describing the resulting final, rotated data in adcp.u/v/w
- u: 2D matrix, East velocity relative to True North
- v: 2D matrix, North velocity relative to True North
- w: 2D matrix, Upward Velocity
- u_std, v_std, w_std: standard deviations for ensemble averaged u,v,w (averaged products only)
- u_count, v_count, w_count: the number of ensembles/pings that contributed to u,v,w (averaged products only). Differs from pingsPerEnsemble in that it accounts for filtered / NaN-ed data
- velocityError: 2D matrix, computed using RDI algorithm
- backscatter: 3D matrix based on received signal strength intensity (adcp.intensity), compensated for two-way spreading (20LogR) and absorption. Equation based on Gostiaux and van Haren ("Extracting Meaningful Information from Uncalibrated Backscattered Echo Intensity Data, Journal of Atomsheric and Oceanic Technology, 72, 943-949, 2010). The absorption computation follows Ainslie and Malcolm ("A simplified formula for viscous and chemical absorption in sea water", Journal of the Acoustical Society of America, 103(3), 1671-1672, 1998). Absorption coefficient based on mean depth, temperature and salinity in adcp structure.
- meanBackscatter: same as above, except averaged over the four beams to create a 2D matrix. Averaging is done by converting to standard intensity, averaging, then converting back to decibels.
config: structure containing ADCP configuration details, where some field names are appended with '_XX' to represent the corresponding configuration command (beneficial for experienced RDI ADCP users).

- fwVer: CPU firmware version
- fwRev: CPU firmware revision
- sysCfg: hardware configuration definition
- freq: frequency
- beamPattern: convex or concave
- orient: orientation (e.g.,'Up' indicates transducers are looking upward)
- beamAngle: beam angle
- janusCfg: description of Janus Configuration
- lagLength: time period between sound pulses
- nbeams: number of beams
- nbins_WN: number of bins
- npings_WP: number of pings per ensemble
- cellSize_WS: length per cell
- profilingMode: sigal processing mode
- corrThresh_WC: correlation threshold
- codeReps: code repetitions in transmit pulse
- percentGoodMin_WG: percent good threshold
- errVelThreshold_WE: error velocity threshold
- timePing_TP: time between pings within ensemble
- coord_EX: coordinate transformation processing parameters
- coordSys: coordinate system (evaluated from coord_EX)
- headingAlign_EA: correction factor for physical heading misalignment
- headingBias_EB: correction factor for electrical/magnetic heading bias
- heading_EH: manual setting of the heading from device attributes (not in RDI file, added after)
- sensorSrc_EZ: defines selected source of environmental sensor data
- sensorAvail: defines available sources of environmental sensor data
- bin1Dist: distance to the middle of the first depth cell
- transmitLength_WT: length of the transmit pulse
- falseTrgt_WA: false target threshold
- transmitLagDistance: distance between pulse repetitions
- cpuSN: CPU board SN
- sysBndwdth_WB: bandwidth setting (narrow or wide)
- sysPower_CQ: system power setting
- instSN: instrument serial number
- ensInterval: ensemble interval
- soundAbsorptionCoefficient: sound absorption coefficient used for computing backscatter
- ambiguityVelocity_WV: radial ambiguity velocity (not in RDI, added after)
units: structure containing unit of measure for fields in structures above. For instance, units.pressure='decibar'.

For details about the configuration parameters, refer to the manufacturer documentation (especially the WorkHorse Commands and Output Data Format manual).
Example: RDIADCP75WH3808_20101106T000225.mat
Oceans 2.0 API filter: extension=mat
NETCDF Files
NetCDF is a machine-independent data format offered by numerous institutions, particularly within the earth and ocean science communities. Additional resources are noted here.
The RDI NetCDF file is extracted from the data contained in the above MAT file. The NetCDF file contains the following main variables: u, v, w, time, binmap_depth, where the binmap_depth variable here is distinct from the pressure sensor measurement in the MAT file (adcp.depth). When there is bin-mapping performed on the data, the binmap_depth is calculated as meta.depth - adcp.range; it is the approximate water depth at which the measurement bins are located. If bin-mapping is 'none', then the binmap_depth and the depth are equal. depth is calculated as meta.depth - adcp.backscatterVerticalRange, which is the range corrected for tilt. depth is used to plot the beam-averaged backscatter and any other beam-averaged values that are not bin-mapped. The structure and content of the netCDF file is very similar to that of the MAT file, including the variable naming.
The NetCDF files are intended to be in compliance with the CF-1.7 standard. Depending on the compliance checker that is used the data may not meet this standard for the following reasons: The units dB are not defined, and the feature type of the data is not defined.
Example: (too large to attach here)
Oceans 2.0 API filter: extension=nc
Discussion
To comment on this product, click Add Comment below.