Overall Processing Flow
Velocity data acquired from RDI and Nortek ADCPs can take on several forms. The original, unaltered velocity data, read from the raw files is normally presented in the MAT file product as adcp.velocity (RDI) or data.velocity (Nortek). (Please note that the data structure names for RDI is adcp and for Nortek we use data, substitute data for adcp when looking at Nortek data). Also in the MAT file product is the config struct that contains information on how the data was collected. Based on the configuration, the original data is processed to present the velocities relative to East-North-Up: this is the final data in the netCDF, MAT files and in the daily current plot PNG and PDF (see adcp.u, adcp.v, adcp.w in the MAT file and in the MAT file description below). u,v,w velocities are always relative to geographic North and local gravity (for Up).
In general, the aim of ADCP post-processing is to replicate the functionality in the manufacturer's post-processing software: RDI's winADCP and Nortek's Surge and Storm (which replaced ExploreP). RDI provides documentation on their rotations, see: ADCP Coordinate Transformation and the more general guide Acoustic Doppler Current Profiler: Principles of Operation - A Practical Primer (as a background only). Nortek's rotations are documented online, see: http://www.nortek-as.com/lib/forum-attachments/coordinate-transformation/view or the matlab code directly: post-2-71782-Xform.m. See RDI software support login for RDI software and http://www.nortek-as.com/en/support/software for Nortek software.
The overall processing flow is listed below. This sequence is as the code is written. Some of the steps listed here are expanded upon in sections following this one. Right away there is a decision point based on the co-ordinate system: Instrument & Beam versus Earth. The coordinate system parameter in each device's configuration determines the type of data that is acquired and how it is processed to produce u,v,w velocities. In the MAT file product, see config.coordSys. If the co-ordinate system is set to 'Beam', the original data contains the radial (along-beam) velocities for each of the 4 or 5 beams, otherwise the velocities are rotated to an orthogonal co-ordinate system: 'Instr' (RDI) or 'XYZ' (Nortek) means the original velocities have been rotated to a basis defined by horizontal plane of the instrument with an azimuth relative to the direction of beam 3, while 'Earth' is relative to the onboard magnetic compass or a fixed direction defined by config.heading_EH (RDI only). Our default setting is 'Beam' so that the most raw form of the data is collected. 'Ship' is not recognized/used. For RDI ADCPs, when the co-ordinate system is either 'Earth' or 'Instr', the 4th row in the adcp.velocity matrix is the error velocity (the measurement error on the velocity at that bin and time).
From Instrument or Beam data:
- If Instrument co-ordinate data, convert from Instrument to Beam co-ordinate data
- Exclude bad beams (RDI only, specified by device attribute, forces three-beam solutions to on)
- Apply correlation screening (RDI only, except for a fixed 50% screen on Nortek Signature55 data, applied to match Nortek's Signature Viewer software, option available)
- Apply fish detection screening (RDI only, if requested, tunable)
- Apply bin-mapping (RDI default is 'nearest vertical bin', Nortek default is none, option available)
- Apply three-beam solutions (RDI only, if requested, option available)
- Transform from Beam co-ordinate data to to Instrument co-ordinate data
- Rotate Instrument data to true Earth (via a combination of fixed heading/pitch/roll, magnetic declination corrected compass heading and onboard pitch/roll data)
- Apply error velocity screening (RDI only, option available)
- Do ensemble averaging if requested (option available)
From Earth data (for RDI only):
- Do nothing if RDI source file has been rotated to true Earth (via a combination of fixed heading/pitch/roll, magnetic declination corrected compass heading and onboard pitch/roll data),
otherwise rotate from magnetic Earth to True Earth (via a combination of fixed heading/pitch/roll, magnetic declination corrected compass heading and onboard pitch/roll data) - Apply error velocity screening if the requested threshold is more stringent than the screening applied onboard the device (option available)
- Do ensemble averaging if requested (option available)
The steps above with option available (in brackets above) are tuneable by the user as detailed in the data product options below. The ADCP.processingComments field in both Nortek and RDI MAT file data products provides the user with a log of the decisions made in this processing flow. The MAT files (RDI only) also has a structure called ADCP.processingOptions that details what options the user chose and what options were actually applied, as some options, such as the error velocity screening threshold, are not always applicable. See the data product options and MAT file format sections below for more information. This is complicated, contact us for help.
Rotation of Velocities to East-North-Up Co-ordinate System (Earth step #1, Instr/Beam step #8)
RDI sensor source and sensor availability parameters determine if additional sensors are available to be used for rotation, such sensors include: magnetic compass, tilt sensor (for pitch and roll), depth, conductivity and temperature (the last three are used to determine the sound speed, however we normally fix that value, see config.soundspeed_EC). In the MAT file, see config.sensorSource_EZ and config.sensorAvail. If the magnetic compass is available, it is often used for Earth co-ordination rotation. The Nortek ADCPs always have compass and tilt sensors and prescribed sound speeds.
Magnetic compasses are not reliable when in close proximity to varying electromagnetic or magnetic fields (electric power cables or the steel instrument platform can cause the compass to be inaccurate). To improve the data, we normally supply a fixed heading from the site and device metadata. If the device is mobile, deployed on a mooring, cabled profiler or glider, a mobile position sensor is normally supplied. Here is an example of a mobile ADCP site: http://dmas.uvic.ca/Sites?siteId=100206 and here is an example of a fixed site: http://dmas.uvic.ca/Sites?siteId=1000359. If the device is mobile and is attached to a device that can supply better orientation information, such as an optical gyro, the data processing code will make use of that device when its sensors are assigned to the heading/pitch/roll of the ADCP's site (we currently do not yet have an example of such a scenario). If neither fixed or mobile heading/pitch/roll are assigned, then the system defaults to the device's internal sensors. When using the onboard magnetic compass, a correction is applied for magnetic declination (if onboard heading is set manually (RDI only), magnetic declination correction is not done). For RDI only, we replicate RDI's gimbal correction for pitch.
Rotation of the input velocities to produce East-North-Up velocities (u,v,w) is performed accounting for the incoming co-ordinate system, types and sources of the data. This is somewhat complicated, therefore, all of the processing steps are documented in the MAT files, see adcp.processingComments. As an example, here is a common scenario: raw data has been collected in the 'Earth' co-ordinate system defined by the onboard magnetic compass and pitch/roll senors, but the instrument is stationary with a known fixed heading, then difference between compass heading and the fixed is calculated and used to rotate the East and North velocities. In that case, adcp.processingComments would say (use the matlab command char):
>> char(adcp.proccessingComments) adcp.velocity(1:3,:,:) contains the unaltered velocity data relative to the co-ordination system: Earth. acdp.velocity(4,:,:) is the RDI error velocity. adcp.u/v/w are processed velocities relative to true East/North/Up, respectively. Using a fixed true heading of 228 degrees from metadata. This device does not have a fixed value for pitch or pitch sensor assigned; using onboard sensor for pitch (pitch gimbal correction applied). This device does not have a fixed value for roll or roll sensor assigned; using onboard sensor for roll. Beam range bins were corrected for tilt by nearest vertical bin-mapping (RDI method) onboard the device (new pitch/roll values not applied). Average or fixed tilt is 3.14 degrees. adcp.range is the vertical range to the corrected bin centres. Rotated Earth co-ordinate, device-supplied adcp.u/v to true North from onboard magnetic North, using a fixed or variable external source true heading (pitch/roll rotation unchanged). adcp.backscatter (relative volume backscattter) calculated from 0.45*adcp.intens + 20*log10(adcp.range) + 2*config.soundAbsorptionCoefficient*adcp.range, adcp.meanBackscatter calculated by beam-averaging the volume backscatter, adcp.meanBackscatter and adcp.backscatter have units of relative dB. For information on the various processing steps applied, see http://wiki.neptunecanada.ca/display/DP/5.
For advanced, interested users, here is the core code that does the rotation for the scenario above, rotating Earth co-ordinate data derived on-board the instrument to a fixed heading true Earth co-ordinate data set.
Here's the rotation to true Earth co-ordinates when the original data is in Instrument or Beam co-ordinates. This does not include the transformation from beam to instr (step #7). This is step #8 in the Instr/Beam overall process flow:
For Nortek ADCPs, the process is a bit different and simpler. We convert all data back to Beam co-ordinate data and then use the same beam to true Earth code to derive the true Earth co-ordinate data.
Correction for Tilt: Bin-mapping (For Instr/Beam data only, step #5)
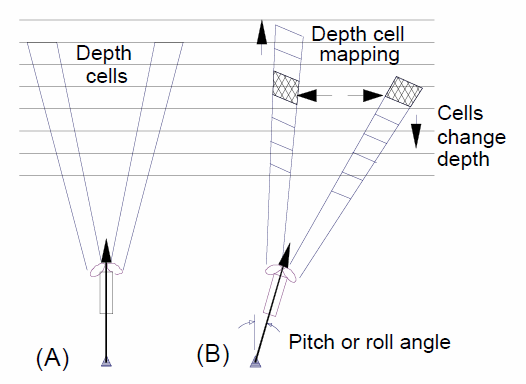
In addition to coordinate system rotations, the orientation of the instrument affects the vertical range on which the measurement bins are spaced (depth cell and measurement bin are synonymous). If the instrument is significantly tilted, the bins used to determine the velocities at each range will be at different water depths. Here is Figure 21 from Acoustic Doppler Current Profiler: Principles of Operation - A Practical Primer, notice in (B) that the highlighted depth cells are not the same as in (A):
RDI ADCP data collected in Earth co-ordinates normally has had a depth cell mapping algorithm applied to align the depth cells to correct for tilt, while the other modes have not had it applied. Depth cell mapping is applied in post-processing in winADCP. Nortek's Storm / Surge post-processing software also applies bin-mapping when doing co-ordinate system rotations/transforms. (The term 'bin-mapping' is used by Nortek, RDI uses 'depth cell mapping'. We use 'bin-mapping' as it's the most common term in the literature.) Conversely, Nortek ADCP data collected in ENU co-ordinates has not had bin mapping applied. To apply bin-mapping, ENU data is converted back to Beam data, bin-mapping is applied and then converted back to ENU, doing any rotations as needed. The approach originated as described by Pulkkinen (1992). The Pulkkinen / RDI bin-mapping method is based on matching up the nearest vertical bin in each beam for each of the original range steps, then the radial velocities from those bins are used in the rotation to true Earth velocities. For compatibility with original VENUS ADCP data products, an alternative method is offered as a option as well, as described by Ott (2002). In that paper, the Ott method is shown to be an improvement over the discrete nearest vertical bin matching method. The Ott method uses a linear interpolation between the nearest vertical bins for each beam for each of the original range steps. The Ott method also interpolates over a small number of missing bins, otherwise missing data nullifies a greater extent of the data than it does in the nearest vertical bin method. The inner and outer most bins can end up with NaN values when there are less than 4 bins at the same vertical level, see the above graphic. This affects the nearest vertical bin method more so than the Ott method, and more bins are affected with increasing tilts.
Users are offered the option of 'None', 'Nearest vertical bin', or 'Linear interpolation (Ott method)'. When the data is in Earth co-ordinates, bin-mapping cannot be applied/modified. For RDI Earth data, the nearest vertical bin method has normally been applied, while Nortek Earth data does not have bin-mapping applied. In both cases, the users' preference may be overridden. The RDI manual indicates that pitch or roll values greater than 20 degrees are not possible and nominal processing has, in the past, applied NaN values when the pitch or roll exceeds that limit. However, we have found that RDI ADCPs can accurately report higher tilts. The limit is now set to 60 degrees for pitch/roll and at or above 90 degrees of average tilt, bin-mapping is overridden to the 'None' option.
Bin-mapping is not applied to the backscatter and intensity data. Instead, we offer a vertically corrected range in the mat file products and use this range for the plots when plotting against depth. For example, if the bin spacing is 1 m, but the tilt is 10 degrees, the vertical spacing is 0.98 m.
For advanced, interested users, here is the core code that does bin-mapping:
Three-Beam Solutions (For RDI ADCPs Only, Instr/Beam step #5)
In systems with four beams, the transformation from radial velocites to Earth co-ordinates velocities has redundant information; only three beams are needed to resolve currents in the three orthogonal directions, while the 4th beam effectively provides error estimation. In the case where exactly one bin out of of the four at any level is flagged and NaN'ed, then currents can still be calculated from the remaining three radial velocities, using the three-beam transformation solution. The screening steps that can flag the data 'NaN' prior to transformation include fish detection and correlation threshold, as well as any bin-mapping (particularly the RDI nearest vertical bin which can set many bins to NaN). The three-beam solution works by assigning the error velocity to be zero and then solving the transformation for the missing bin (for more details see Three Beam Solutions in adcp coordinate transformation_Jan08.pdf). With the missing data filled in, the normal transform from Beam to Instrument co-ordinate data is applied.
In cases where the data quality team has determined that an entire beam is bad, they can supply a device attribute specifying the bad beam number. That beam is then excluded in the processing from beam or instr co-ords and the values are filled in with the three-beam solution. Only the U,V,W results are affected, the raw velocity data as recorded by the instrument is presented without the exclusion. This forces the 3 beam option to on, regardless of the user input. The excluded beam number is mentioned in a comment on both the currents plot and intensity plots and in the processing comments in the mat files. This is currently only available for RDI ADCPs with 4 beams.
Here is the code for three-beam solutions and transform from Beam to Instrument (XYZ) co-ordinate data:
Screening
Correlation screening is the most widely applied and effective screening step, noted as step #3 in the Instr/Beam overall processing flow. It is also applied onboard RDI ADCPs when in Earth co-ordinate configuration, the value applied is available in the config structure.
Nortek ADCPs are generally three beam (so the three-beam solution option is not offered) and screening is not applied in the data products, except for a fixed 50% correlation screen on Nortek Signature55 data only, applied to match Nortek's Signature Viewer software.
RDI ADCPs screening steps also include a fish detection algorithm and screening, Instr/Beam step #4 in the overall process flow.
Once in Earth co-ordinates, the data can also be screened by the error velocity. Error velocity screening only applies to data with four valid beams (and non-zero error velocities). For further information on the screening steps, including algorithms, see adcp coordinate transformation_Jan08.pdf (RDI ADCPs only). This is step #9 in Instr/Beam and #2 in Earth data process flows.
Data Verification
As noted earlier, the ultimate requirement for the ADCP data products is that they replicate the results of the manufacturer's software. We test against the manufacturer's software to verify the data at every software release (regression testing). There are cases where this adherence is intentionally not true: if users choose any non-default option (or that says it's not the RDI default), the results will not match the default processing in the manufacturer's software, in particular, the Ott bin-mapping option is not available on winADCP at all. The testing suite includes manual and automated testing where the output of the manufacturer's software is compared to the data products and where data products are compared to the captured files from the previous release. The test suite is regularly updated for any new scenarios. Improvements in the test procedure are also made as needed. In addition to testing the software, there has been a significant effort to ensure that the metadata, in particular the heading metadata, is correct. These steps include careful measurement and documentation at deployment time, verifying and vetting ROV heading sensors, comparing data to nearby ADCPs, comparing results between various processing methods, and perhaps the best check is to compare the currents with the known/modelled tides. Contact us for information on the testing procedures and metadata verification.
A recent simplification in testing came about because of an improvement in the generation of RDI file data products, which we archive to speed up generation of subsequent products, MAT/NC files and plots. As of November 2015, RDI files with Beam or Instr co-ordinate data will incorporate the same heading/pitch/roll values as used for rotation and bin-mapping, that way, users and testers may load and process these files with RDI software, matching the values they can obtain from MAT and NC file products. For Earth co-ordinate data in RDI files, if we update the heading, we also need to rotate the East (u) and North (v) velocities as the new heading will be different from the internal compass heading (either fixed value, mobile position sensor or a magnetic declination is applied) on which the onboard Earth co-ordinate rotation was done. In this case, we don't update the pitch/roll as we cannot update the bin-mapping done for Earth data. Fortunately, the pitch/roll data is generally good and we do not yet have any examples where we do not use the internal pitch/roll data. Once the RDI files produced prior to November 2015 are re-generated, all RDI files will be made available in Data Search.
In all, the results from RDI winADCP, and Nortek software will match the processed data products. In addition, the original data, particularly the Beam co-ordinate data is always available in the RDI and Nortek raw binary files and as data.velocity (Nortek) and adcp.velocity (RDI) in the MAT files. The processingComments will completely describe the steps applied to produce the u,v,w processed velocities. In addition to the code snippets above, we are happy to supply more code, collaborate on that code, etc. We are interested in collaborating on QAQC processes, data verification, processing, analysis and research. Contact us if you have any questions.